Supported Reference Frames
Satcat services accept all common reference frames used in spaceflight dynamics. A brief description of each frame and a frame transformation diagram of the order of frame rotations is provided below. All frame transformation have been developed and validated using the International Earth Rotation Service (IERS) Conventions 2010.
Download IERS Conventions 2010 Technical Note 36 [PDF]
Inertial Frames
“The motions of bodies included in a given space are the same among themselves, whether that space is at rest, or moves uniformly forwards in a right line without any circular motion.”
– Sir Isaac Newton, Corollary V
Inertial frames are fixed in space and provide an inertial reference for calculating dynamics. The are defined with an origin that is not rotating and under no acceleration.
EME2000 / J2000
The Mean Equator, Mean Equinox (MEME / EME) is an equinox-based system developed early on in the space age. It uses the intersection of the mean (average) equatorial plane of Earth's rotation and the mean ecliptic plane of Earth's orbit around the Sun. The X coordinate is defined as the first point of Aries, pointing to the location of the Sun at the vernal equinox. The J2000 and EME2000 designation identifies that the X coordinate direction was set on the year 2000 at 12:00:00 Terrestrial Time. However, this direction drifts over time and is updated every 50 years.
GCRF and ICRF
In 2003, the equinox definition was deprecated for a modern system called the International Celestial Reference System (ICRS) that uses extragalactic radio sources for alignment, ensuring an inertial frame that will not drift over thousands of years. The Geocentric Celestial Reference Frame (GCRF) is a vector translation of the International Celestial Reference Frame (ICRF) origin from the solar system barycenter to the center of Earth.
GCRF is the preferred, modern inertial frame.
There is a small, fixed bias [B] rotation between the modern GCRF frame and the equinox-based EME2000 frame.
Pseudo Inertial Frames
Reference frames that account for precession and nutation of the Earth's motion, but do not rotate with the Earth, are called pseudo-inertial frames.
MOD and TOD
Mean of Date (MOD) and True of Date (TOD) equinox-based frames take into account the precession of Earth's rotating pole, where TOD also takes into account the nutation.
CIRF
The Celestial Intermediate Reference Frame (CIRF) is a celestial-based frame that takes into account both precession and nutation using the IAU-2006/2000A (X, Y, s) series expansions.
TEME
True Equator, Mean Equinox (TEME) is an approximate frame only used in analytic SGP4 theories and TLEs.
Satcat services use the US Space Force definition of TEME, where the pseudo Earth-fixed frame (PEF) is used as the intermediary frame between conventional frames and the TEME frame.
Earth-Fixed Frames
Reference frames that rotate along with the Earth's rotation angle are called Earth-fixed frames. These frames are non-inertial.
PEF / EFG
Pseudo Earth-fixed (PEF) and the equivalent Earth-Fixed Greenwich (EFG) equinox-based frames rotate with respect to the mean equator of the Earth. They do not represent fixed locations on Earth, and instead represent the current angle of the Greenwich meridian with respect to the Sidereal hour angle.
TIRF
The Terrestrial Intermediate Reference Frame (TIRF) celestial-based frame uses the Earth rotation angle to determine the angle of the Greenwich meridian.
ITRF
The International Terrestrial Reference Frame (ITRF) frames are True Earth-fixed frames that are defined relative to the Earth's crust. ITRF frames take into account short-period polar motion, which requires regularly updated Earth Orientation Parameter (EOP) data from the IERS. ITRF reference frames are calibrated every few years as the Earth's crust slides on top of the mantle in unpredictable ways.
Satcat services use the latest ITRF 2020 (2015.0 epoch) frame definition as the base ITRF frame, per IERS requirements. Other ITRF years are available and indicated by the syntax ITRF_XXXX, where XXXX is the year.
Local Frames
Local reference frames are rotations centered on RSO bodies or ground stations. They typically require alignment trajectories or states to transform to coordinate system reference frames.
RTN and PTW
Radial, Transverse, Normal (RTN) is a common local frame that uses the radial $R$ and normal $N$ vectors to define a body-centered reference frame, where $T=N\times R$.
PTW is similar to RTN, but uses the velocity $T$ and normal $W$ vectors to define the body-centered frame, where $P=T \times W$. RTN and PTW are coincident frames for circular orbits.
RTN is also known as RIC (Radial, In-track, Cross-track), RSW, or UVW. PTW is also known as TVN, and is similar (but not identical) to VNC.
LVLH and Alt/Az
The topocentric frames available for use are Local Vertical, Local Horizontal (LVLH) and Altitude Azimuth (Alt/Az). LVLH is used to define ground station observation measurements, while Alt/Az is used to define maneuver pointing cone constraint angles.
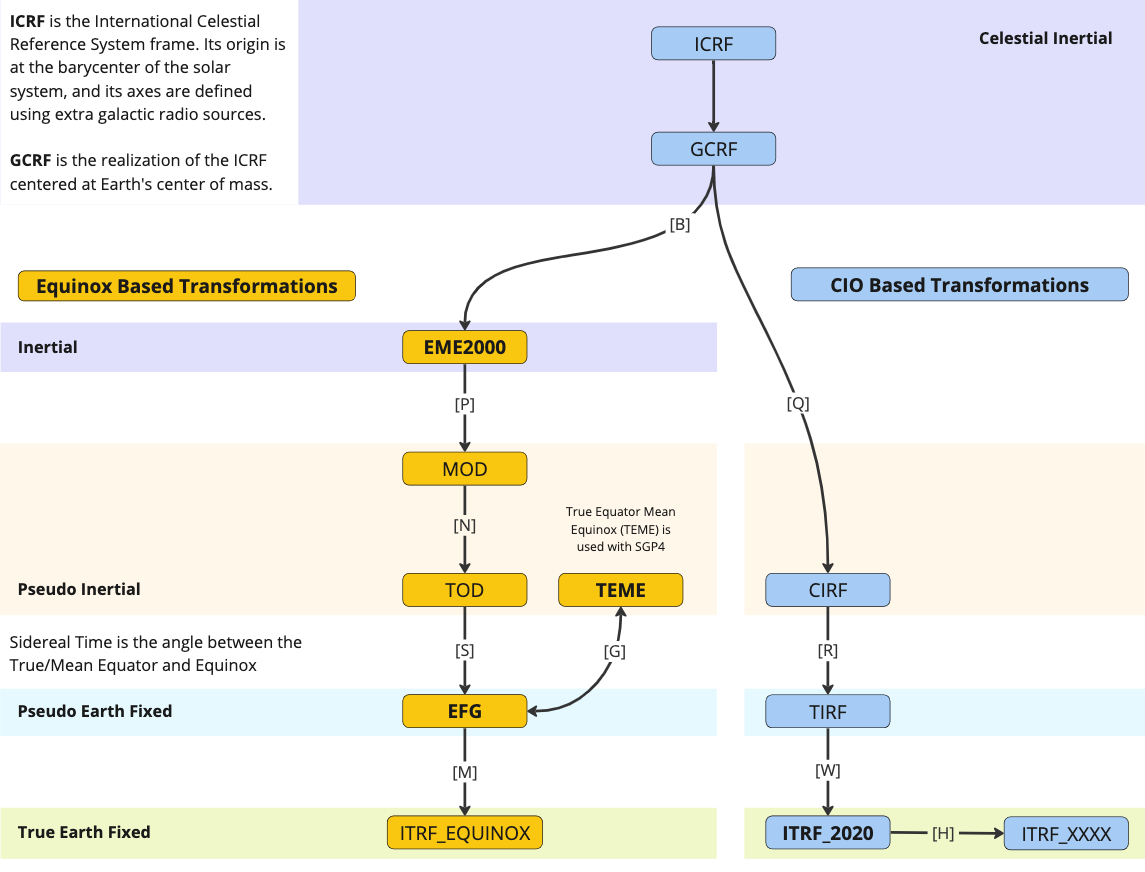
Frame Transformation Diagram