宇宙交通調整
近年、軌道上で活動する衛星が増えており、運用中の宇宙機間の衝突リスクを低減するために、宇宙交通調整(STC)が不可欠になっています。Kayhan Spaceは、接近事象が起きた際にオペレーターが直接強調できるようにする、運用レベルのSTCフレームワークを初めて開発しました。
Satcatは、衝突回避の意図を伝え、マヌーバの責任を割り当て、オペレーター間の相反する行動を防ぐためのツールを提供します。これらの機能はコンジャンクションのワークフローに組み込まれているため、意思決定が行われる場所で調整が行われます。
管理から調整へ
**宇宙交通管理(STM)**フレームワークでは、衝突回避におけるオペレーターの広範な責任を定義していますが、衝突回避マヌーバを調整するためのプロセスは提供していません。また、ほとんどのオペレーターは、他の活動中の宇宙機が関与する高リスクな接近事象においても、依然として個々別々に行動しています。
コンステレーションの増加と軌道領域の共有化に伴い、このようなモデルはもはや十分ではありません。オペレーターは意図を伝え、相手のオペレーターの意図を理解できなければなりません。
Satcatにおける協調機能
Satcatの協調システムは、Space Safety Coalition (SSC)のガイドラインに基づいており、Satcatの安全な衛星運用を行うためのルールを通じて運用化されています。
Satcatの主な協調機能は次のとおりです。
-
マヌーバ責任の割り当て
SatcatはSSCの操縦能力カテゴリに基づいて責任を割り当て、どちらのオペレーターが行動を起こすことが期待されるかを示します。 -
軌道暦データによる衝突回避の意図の宣言
オペレーターは、軌道暦にコンテキストタグ(例:COLA、ROUTINE)を付けてアップロードすることで、衝突回避の意図を伝えます。 -
オペレーター調整の随時実行
調整は、リアルタイムの対話の有無にかかわらず行われるように設計されています。各オペレーターは独立して、自身の意図を確認、応答、更新することができます。
SSCの操縦能力カテゴリ
SSCは、公平で一貫したマヌーバ責任の割り当てをサポートするために、マヌーバ能力のレベルを定義しています。
| 操縦能力カテゴリ | 説明 |
|---|---|
| Non-maneuverable(マヌーバ不可能) | マヌーバを行う能力がない |
| Minimal(最低限でマヌーバ可能) | ごくわずかにしか軌道変更ができない |
| Maneuverable (手動でマヌーバ可能) | 短時間で容易に軌道変更が可能 |
| Automated COLA(自動化されたCOLAシステム搭載) | 自律的にマヌーバの決定が行われる |
| Crewed spacecraft(有人宇宙機) | 軌道変更のできる乗員が乗った宇宙機 |
| Undetermined(未確定) | 宇宙機の操縦能力が不明 |
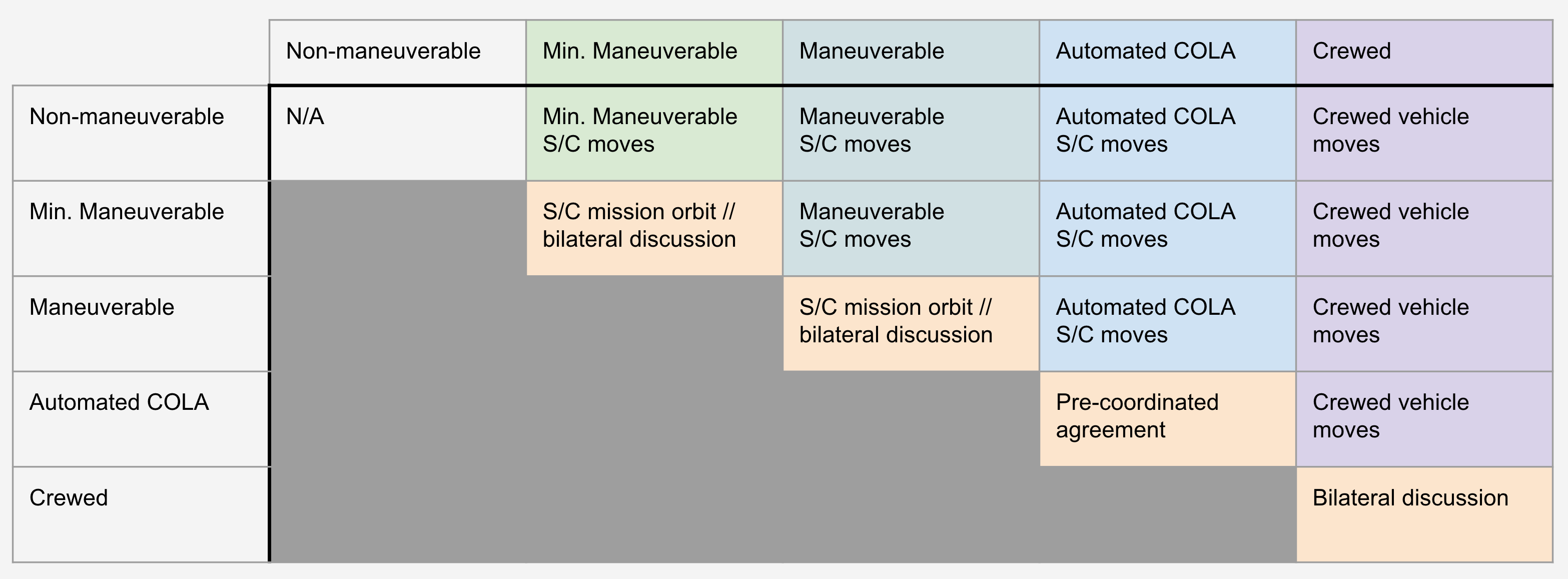
プライマリとセカンダリの宇宙機が同じカテゴリに属する場合、相互の調整が必要です。
Satcatの協調機能やその他については、以下を参照してください。