対応している基準座標系
Satcatのサービスは、宇宙航行力学で使用されるすべての一般的な基準座標系に対応しています。このページでは、各座標系の簡単な説明と、座標回転の順序を示す座標変換図を載せています。全ての座標変換は、国際地球回転・基準系事業 (IERS) 刊行の IERS Conventions 2010に基づいて開発および検証されています。
IERS Conventions 2010 Technical Note 36 [PDF]をダウンロード
慣性座標系
“The motions of bodies included in a given space are the same among themselves, whether that space is at rest, or moves uniformly forwards in a right line without any circular motion.”
– Sir Isaac Newton, Corollary V
慣性座標系は空間に固定されており、力学計算のための基準座標系としての役割を担います。座標系は、加速度を持たない原点によって定義されます。
EME2000 / J2000
平均赤道、平均春分点座標系 (MEME / EME) は、宇宙開発の初期に考案された春分点基準の座標系です。この座標系は、地球の自転による平均赤道面と、地球が太陽の周りを公転する平均黄道面の公転を用います。
この座標系のX座標は、春分点における太陽の位置を指す、白羊宮の原点と定められています。J2000およびEME2000という名称は、X座標の方向が西暦2000年12時00分00秒(地球時)に設定されたことを示しています。ただし、この方向は時間とともにずれていき、およそ50年ごとに更新されます。
GCRFとICRF
2003年、春分点を基準にした定義は廃止され、より現代的な座標系である、国際天球基準座標系(ICRS)に置き換えられました。ICRSは銀河系外の電波源を基準に整列させることで、数千年に及んでもずれない慣性座標系を保証しています。地心天球基準座標系 (GCRF) は、国際天球基準座標系 (ICRF) の原点を、太陽系重心から地球中心に平行移動したものです。
GCRFは現在推奨されている慣性座標系です。
現在のGCRF座標系と、春分点基準のEME2000座標系の間には、わずかな回転のずれ [B](バイアス回転)が存在します。
疑似慣性座標系
擬似慣性座標系とは、地球の歳差と章動は考慮するけれど、地球とともに回転しない座標系のことです。
MODとTOD座標系
平均春分点座標系 (MOD)と真春分点座標系 (TOD) は、いずれも地球自転軸の歳差を考慮した、春分点基準の座標系です。
CIRF座標系
天球中間基準座標系 (CIRF) は、歳差と章動の両方を考慮する天球基準の座標系で、IAU 2006/2000Aの (X, Y, s) 級数展開に基づいて定義されています。
TEME座標系
真赤道、平均春分点座標系 (TEME) は、おおよその近似座標系であり、TLEやSGP4理論で解析する場合のみ使われます。
Satcatは、TEME座標系の定義としてアメリカ宇宙軍の方式を採用しています。この方式では、従来の座標系とTEME座標系の間の中間座標系として、疑似地球固定座標系 (PEF) が用いられます。
地球固定座標系
地球固定座標系とは、地球の自転角とともに回転する、非慣性の基準座標系です。
PEF/EFG座標系
疑似地球固定座標系 (PEF) および地球固定グリニッジ座標系 (EFG)は、地球の平均赤道に対して回転する春分点基準の座標系です。これらの座標系は、地球上の固定した位置を表すものではなく、グリニッジ子午線の位置を恒星時角に基づいて示すためのものです。
TIRF座標系
地球中間基準座標系 (TIRF) は天球基準の座標系であり、グリニッジ子午線の角度を地球が自転するときの角度(地球自転角、ERA)によって定められます。
ITRF座標系
国際地球基準座標系 (ITRF) は、地殻に対して定義される地球固定座標系です。ITRF座標系は、短周期の極運動を考慮しており、この極運動を扱うには、国際地球回転・基準系事業(IERS)が定期的に更新する、地球姿勢パラメータ(EOP)のデータが必要となります。また、地殻がマントルの上を予測不可能な形で移動するため、ITRF座標系は数年ごとにキャリブレーションされます。
Satcatサービスは、IERSの要件に基づき、最新のITRF 2020 (2015.0エポック) の定義をITRF座標系の基準として使用しています。その他のITRF年次版も利用可能で、ITRF_XXXX(XXXXは年)という書式で表されます。
ローカル座標系
ローカル基準座標系は、RSOまたは地上局を中心とした回転座標系です。通常、この座標系を基準座標系へ変換するには、軌道データや状態ベクトルが必要となります。
RTN座標系とPTW座標系
動径、軌道進行、法線 (RTN) 座標系は、一般的なローカル座標系であり、放射ベクトル$N$を用いて物体中心の基準座標系を定義します。このとき、$T$ = $N\times R$です。
PTW座標系はRTN座標系に似ていますが、速度ベクトル $T$ と法線ベクトル $W$ を用いて物体中心の基準座標系を定義します。このとき、$P=T \times W$ となります。
円軌道の場合、RTN座標系とPTW座標系は一致する座標系となります。
RTN座標系はRIC (Radial, In-track, Cross-track)、RSW、またはUVWとも呼ばれます。PTW座標系はTVNとしても知られ、VNCに似ていますが完全に同一ではありません。
LVLHおよびAlt/Az
Satcatで使用可能な地心座標系には、局所垂直・局所水平座標系 (LVLH) と高度・方位角座標系 (Alt/Az) があります。LVLH座標系は地上局の観測測定値を定義するために使用され、Alt/Az座標系はマヌーバの推進方向にある制約角を定義するために使用されます。
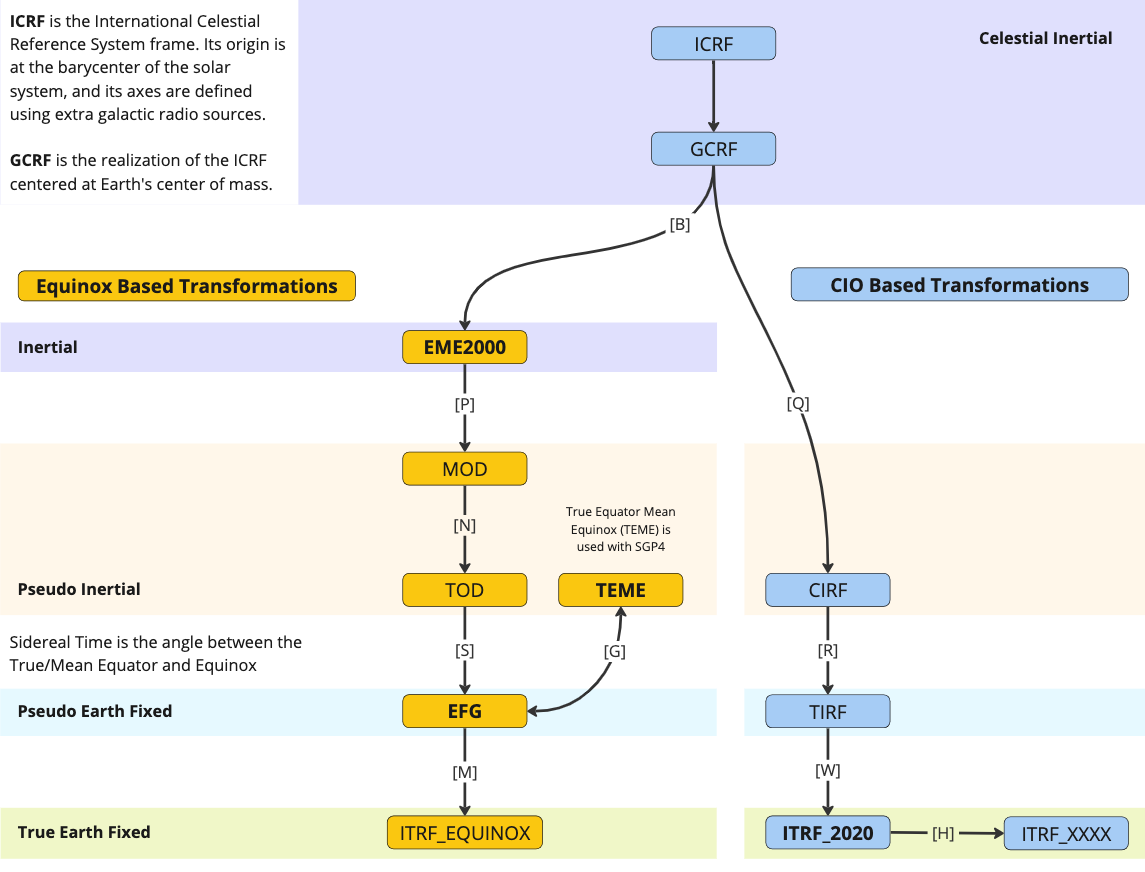
座標系変換の図